As we move into 2026, the robotics landscape has shifted from experimental prototypes to indispensable industrial assets. Deep Robotics has emerged as a cornerstone of this transition, bridging the gap between digital AI and physical labor. With the release of the flagship X30 and the CES 2026 Innovation Award-winning LYNX M20, the industry is no longer asking if robots can replace humans in hazardous zones, but rather which form factor is best suited for the mission.
Whether it is the raw, rugged power of a pure quadruped or the high-speed hybrid efficiency of wheeled-legged systems, these two platforms represent the “Special Forces” of modern industrial inspection.
II. Deep Robotics X30: The Industrial Workhorse
The Deep Robotics X30 represents a fundamental shift in quadrupedal engineering, moving from “nimble laboratory bionics” to “heavy-duty industrial hardware.” To achieve this, the X30 incorporates a multi-layered technical stack designed for reliability under physical and environmental stress.
2.1 Mechanical Engineering & Extreme Environment Resilience
At the core of the X30’s durability is its chassis architecture, designed to mitigate the two greatest threats to industrial robotics: thermal runaway and particulate/liquid ingress.
- Thermal Management System: Operating between -20°C and 55°C requires more than just high-quality lubricants. The X30 employs an active internal thermal regulation system. In sub-zero environments, the robot utilizes internal resistive heating to maintain the battery and joint actuators at optimal operating temperatures. In high-heat scenarios (such as proximity to industrial furnaces or metal smelting), the chassis acts as a large heat sink, paired with internal airflow management to prevent sensor drift or compute throttling.
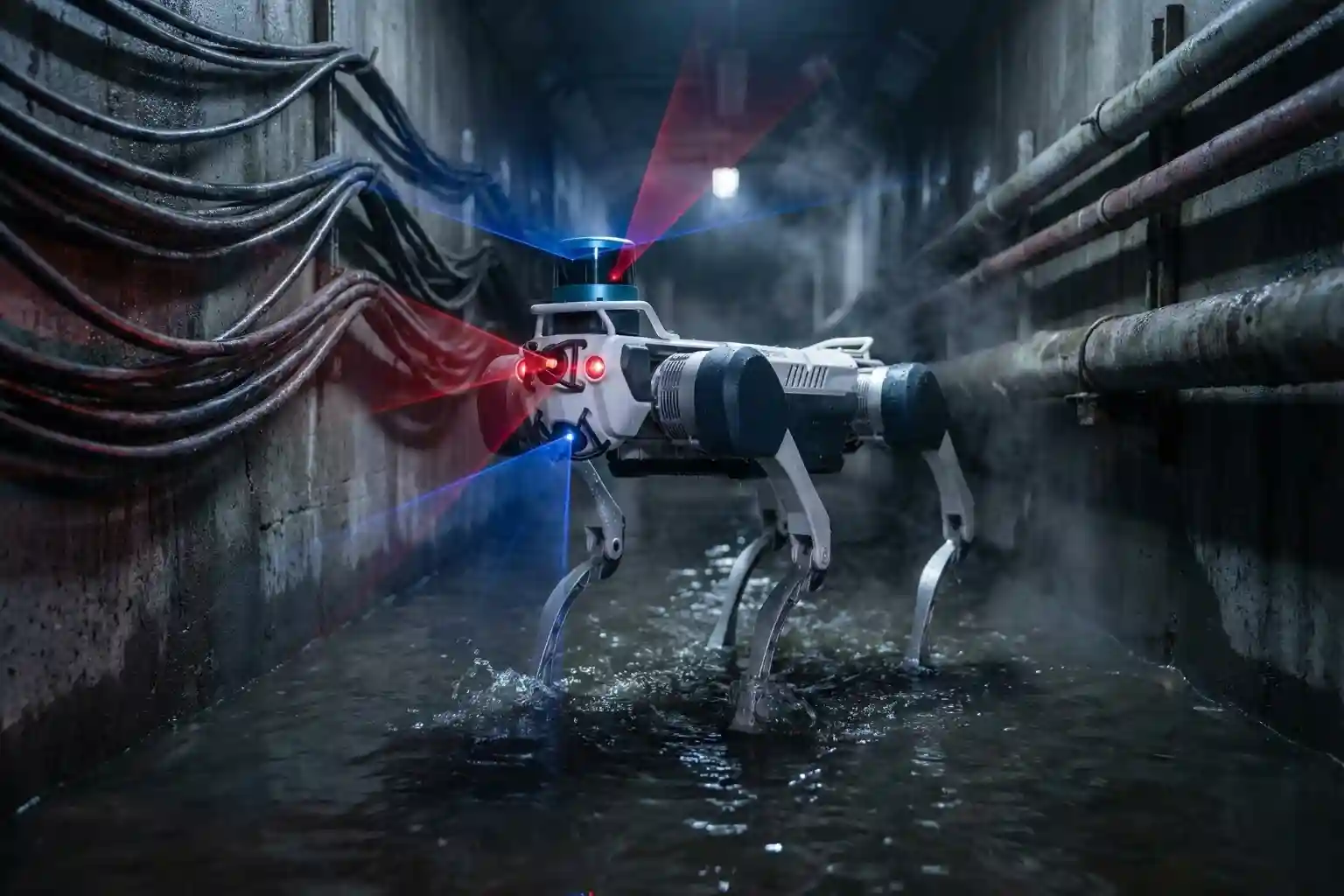
- IP67 Sealing Technology: Unlike consumer-grade robots that use simple rubber gaskets, the X30 utilizes high-compression industrial seals and specialized coatings on all rotating joints (the “shoulders” and “knees”). This IP67 rating ensures that the robot is not only dust-tight but can survive temporary submersion in water up to 1 meter deep—a critical feature for inspecting flooded cable tunnels or operating in torrential storms.
- High-Torque Joint Actuators: The X30 is equipped with the J80 and J100 series joints, which feature a high torque density. The mechanical advantage is driven by planetary gear reducers with low backlash, allowing for precise force control. The torque equation for these actuators can be simplified as T = Kt . I, where Kt is the motor torque constant and I is the current. By maximizing the Kt through proprietary winding techniques, the X30 achieves the high “sumo” strength required to recover from a fall while carrying its 20kg+ payload.
2.2 Locomotion Intelligence: DRL and MPC Synergy
The X30 does not “walk” using simple pre-programmed paths; it utilizes a hybrid of Model Predictive Control (MPC) and Deep Reinforcement Learning (DRL).
- Dynamic Stability: The MPC layer manages the robot’s center of mass (CoM) and ground reaction forces (GRF) in real-time. It solves an optimization problem every few milliseconds to ensure the support polygon remains stable even on shifting surfaces like gravel or wet metal.
- Blind Gait Adaptation: A standout feature of the X30 is its “blind gait” capability. Even if the vision sensors are completely obscured by thick smoke or mud, the robot can navigate by “feeling” the terrain through its leg-joint sensors and IMU (Inertial Measurement Unit). By detecting the resistance and contact points of each foot, the DRL-trained algorithms adjust the gait pattern to maintain a 45° climb on industrial stairs.
- Stair Geometry Negotiation: Standard stairs in power plants are often “open-riser.” Traditional LiDAR often misses these gaps, causing robots to “step through” the stairs. The X30’s perception layer uses point cloud filtering to identify the edges of each step, while the locomotion layer adjusts the swing trajectory of the leg to ensure a safe “toe-clearance” on every step.
2.3 Perception Architecture: The “All-Seeing” Platform
The “Strike Through Darkness” capability is powered by a Multi-Sensor Fusion (MSF) array that goes beyond standard RGB cameras.
- Sensor Suite: The X30 integrates a 360° LiDAR (200,000 pts/s), bi-spectrum thermal cameras, and depth sensors.
- Navigating in Zero-Light: Because LiDAR is an “active” sensor, it emits its own light in the form of laser pulses, the X30 creates its own 3D map regardless of ambient lighting. This is paired with an Infrared (IR) imaging system that allows the robot to “see” thermal signatures, which is vital for detecting overheating electrical components in pitch-black substations.
- SLAM and RTK Integration: For centimeter-level positioning accuracy, the X30 supports Real-Time Kinematic (RTK) GPS. In indoor or GPS-denied environments (like underground tunnels), it relies on LiDAR SLAM (Simultaneous Localization and Mapping) to build a high-resolution 3D occupancy grid.
2.4 Power Systems & Operational Continuity
Industrial tasks cannot be hindered by long charging cycles. The X30 addresses this with a sophisticated Power Management System (PMS).
- Hot-Swappable Battery Pack: The X30 features a quick-release mechanism that allows a human operator to swap the battery in under 30 seconds without powering down the main compute module. This is achieved through a small internal capacitor/buffer battery that maintains the robot’s “state” during the swap.
- 25% Endurance Leap: Through improvements in motor driver efficiency and reduced mechanical friction in the joints, the X30 achieves a 2.5 to 4-hour runtime.
- Auto-Charging Dock: For truly autonomous 24/7 operations, the X30 can return to a ruggedized charging station. It uses visual docking (QR code or IR beacon) to align its charging contacts with the dock, ensuring it remains “always-on” for scheduled inspection rounds.
III. LYNX M20: Breaking the Speed-Agility Barrier

While the X30 stands as the “Tank” of the Deep Robotics fleet, the LYNX M20 represents a radical departure from traditional quadrupedal design. It is the world’s first industrial-grade wheeled-legged hybrid robot, a form factor specifically engineered to solve the “Energy-Speed-Agility” trilemma that has plagued pure-legged systems for decades.
3.1 The Hybrid Locomotion Architecture: Theoretical Efficiency
The core innovation of the LYNX M20 lies in the integration of motorized wheels at the distal end of each leg. This allows the robot to operate in two distinct modes, governed by a sophisticated switching logic:
- Wheeled Mode (High-Efficiency): On relatively flat surfaces, the M20 behaves like a four-wheeled drive vehicle. In this mode, the legs act as a high-performance active suspension system. By using its sensors to detect micro-terrains, the M20 can keep its main body (the “torso”) perfectly level while the legs oscillate to absorb vibrations. This drastically reduces the Cost of Transport (CoT). For a pure quadruped, CoT is high because energy is constantly expended to lift and swing legs. The M20 reduces this by nearly 70%, enabling a 15km range on a single charge.
- Legged Mode (High-Agility): When the onboard dual 96-line LiDAR identifies an obstacle higher than the wheel’s radius (e.g., a 25cm stair or a fallen beam), the M20 switches to a legged gait. The wheels are electronically locked, serving as high-friction “feet” with a large contact patch, providing superior grip on slippery or uneven surfaces.
3.2 Advanced Joint Kinematics: The “Front-Elbow/Rear-Knee” Configuration
The M20 features a unique hyper-flexible joint architecture that differs from the X30. Its “front-elbow/rear-knee” configuration mimics the skeletal structure of high-speed cursorial mammals (like cheetahs).
- Vertical Leverage: This specific joint orientation allows the M20 to exert massive vertical force relative to its mass. It can clear an 80cm single-step obstacle, a feat traditionally impossible for a robot that stands only 57cm tall. This is achieved through a coordinated “pumping” motion where the front legs hook onto the ledge and the rear legs provide a massive forward-and-upward thrust.
- Narrow-Space Mobility: With a body width of only 430mm and a standing clearance requirement of 50cm, the M20 can navigate the cramped catwalks and “pipelines” of chemical refineries where the bulkier X30 might struggle.
3.3 Perceiving the 3D World: Dual-LiDAR Fusion
The LYNX M20 is the first in its class to utilize dual 96-line LiDAR modules, creating a dense, high-frequency point cloud.
- Omnidirectional Coverage: The 360°× 90° Field of View (FOV) ensures there are no blind spots. In industrial logistics, this is critical for detecting overhead hazards (low-hanging pipes) and floor-level obstacles (tools or debris) simultaneously.
- Point Cloud Surround View: By processing roughly 860,000 points per second, the M20 generates a real-time digital twin of its surroundings. Its “Point Cloud Surround View” (enabled via OTA updates) allows operators to see the environment through the robot’s “eyes” in a full 3D reconstruction, facilitating high-precision remote piloting in hazardous “rubble-strewn ruins.”
- Edge Computing Power: To process this massive data stream, the M20 is equipped with dual octa-core 64-bit industrial processors (16GB + 128GB × 2). This allows for on-device AI inference, enabling the robot to classify obstacles (e.g., distinguishing between a “soft” bush it can walk through and a “hard” concrete block it must avoid) without needing a cloud connection.
3.4 Payload Synergy and Modular Expansion
Despite its lighter 33kg frame, the M20 is a “heavy lifter” in the mid-size category.
- Load Dynamics: The M20’s control software accounts for changes in the center of gravity (CoG) when a payload is attached. Whether carrying a 15kg thermal imaging gimbal or a 50kg emergency supply kit, the robot dynamically adjusts its leg stiffness and wheel torque to maintain stability.
- External Interfaces: Like the X30, it features a 72V power input and Gigabit Ethernet ports. This modularity is key for “Scientific Exploration” verticals, where researchers may need to mount high-bandwidth sensors like hyperspectral cameras or gas-composition analyzers.
- Self-Charging & Autonomy: The M20 is designed for “Human-Out-of-the-Loop” (HOOTL) operations. With its optional self-charging dock, it can function as a permanent sentinel, patrolling a 15km perimeter and docking itself when the battery drops below 15%, ensuring 24/7 site security.
V. Use-Case Mapping: Which Robot for Which Task?
Deploying industrial robotics requires matching mechanical capabilities to operational physics. Below is a deep technical breakdown of how the X30 and M20 serve divergent industrial requirements.
5.1 Power & Utilities: The 24/7 Sentinel (X30 Focus)
In Ultra-High Voltage (UHV) substations, electromagnetic interference (EMI) and extreme weather are the primary failure points for electronics.
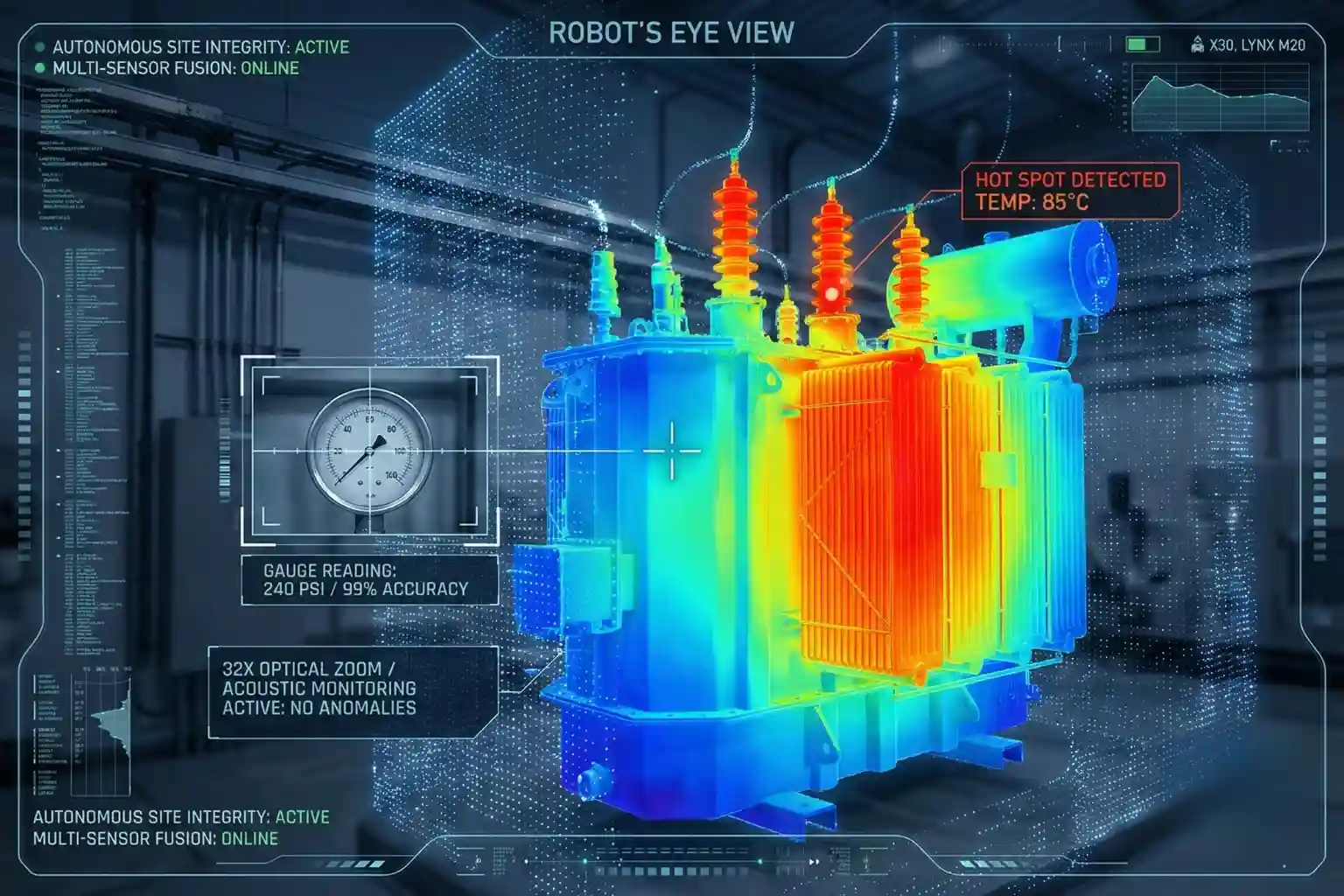
- Precision Meter Reading: The X30 is often outfitted with a 32x optical zoom PTZ camera. Its stability in high-wind conditions ensures that “Analog Meter Recognition” algorithms can read gauge values with 99% accuracy from 10 meters away.
- Acoustic & Thermal Monitoring: By carrying ultrasonic partial-discharge sensors and high-resolution thermal imagers ($640 \times 512$ resolution), the X30 identifies localized “hot spots” in transformers. Its IP67 rating is critical here; oil leaks or chemical sprays in these zones would compromise an IP54 or IP66 rated unit over time.
- Autonomy: The Auto-Charging Dock allows the X30 to perform “scheduled patrols” every 4 hours. If it detects a thermal anomaly, it can autonomously escalate the alert and remain on-site to provide a live feed to human engineers.
5.2 Emergency Response & SAR: The Rapid Scout (LYNX M20 Focus)
In Search and Rescue (SAR) or firefighting, time-to-target is the most vital metric.
- The First-Miler Advantage: The M20 can be hand-carried by a single responder. Once deployed, its 5m/s wheeled speed allows it to cover the first kilometer of a disaster site in under 4 minutes—nearly 3x faster than traditional quadrupeds.
- Navigating Ruins: In collapsed structures, “stair climbing” is less important than “rubble traversal.” The M20’s 80cm step height allows it to vault over concrete slabs and fallen beams that would trap a robot limited to 20cm steps.
- Bidirectional Lighting: Equipped with front and rear high-intensity LEDs, the M20 provides “lighting support” for human teams, while its RF image transmission maintains a low-latency video link even inside reinforced concrete basements.
5.3 Logistics & Large-Scale Security: The Efficiency Master (LYNX M20 Focus)
For facilities exceeding 500,000 m, such as data centers or logistics parks, energy efficiency becomes a financial KPI.
- Area Coverage: The M20’s 15km range allows it to patrol a much larger perimeter than a pure-legged robot.
- Embodied AI Intelligence: The M20’s dual octa-core 64-bit processors allow for on-edge person detection and “animal deterrence” (using high-frequency sonic emitters). It can distinguish between a security breach and a stray animal, reducing “false alarm” fatigue for remote operators.
The New Industrial Standard
The Deep Robotics X30 and LYNX M20 represent the bifurcation of the robotic species. The X30 is the environmental specialist, built to endure where humans and other machines perish. The LYNX M20 is the mobility generalist, built to move faster, further, and higher than ever before.
Contact us and create a fully autonomous grid maintenance where your eyes, ears, and legs are everywhere, anytime.