شاهد-136: حماية فعالة من حيث التكلفة للمواقع الاستراتيجية

يشهد ميدان المعركة الحديث تحولًا سريعًا ودائمًا. لقد انتقلت طائرة شاهد 136 من أداة تجريبية متخصصة إلى ما يسميه الخبراء “سلاحًا موثوقًا به” للحرب غير المتكافئة. تم تصميم هذه الذخائر المتسكعة بطيئة الحركة لغرض واحد: ضرب عميق في أراضي العدو بدقة عالية. لقد قامت بتحريك خطوط المواجهة بعيدًا [...]
DJI Mavic 3: طائرة بدون طيار محمولة للعمل

لسنوات، كانت العمليات الاحترافية للطائرات المسيرة مرادفة للشاحنات الكبيرة، وحقائب المعدات الثقيلة، وفرق العمل المكونة من عدة أشخاص. ومع ذلك، مع تقدمنا حتى عام 2026، أدركت الصناعة حقيقة حيوية: لم تعد الطائرات المسيرة وحدها كافية للأغراض التشغيلية. في حين أن الطائرة المسيرة توصلك إلى السماء، فإن البرامج الموثوقة مطلوبة لمعالجة كميات كبيرة [...]
ليدار الساحلي: رسم خرائط دقيق لترميم بيئة المملكة العربية السعودية

واجهت النظم البيئية الساحلية في الخليج العربي ضغوطًا بيئية هائلة تاريخيًا، خاصةً بعد الاضطرابات البيئية الكبيرة في أوائل التسعينيات. إدراكًا للحاجة الملحة لاستعادة مستدامة، أجرينا مسحًا ساحليًا لاستعادة الـ LiDAR بالطائرات بدون طيار لتوفير بيانات عالية الدقة اللازمة للمعالجة البيئية. لم تكن هذه المهمة مجرد رسم خرائط؛ بل […]
خارج نطاق البشر: العمليات على مدار الساعة طوال أيام الأسبوع في البيئات الصناعية القاسية

مع انتقالنا إلى عام 2026، تحول مشهد الروبوتات من نماذج أولية تجريبية إلى أصول صناعية لا غنى عنها. برزت شركة Deep Robotics كحجر زاوية في هذا الانتقال، حيث سدت الفجوة بين الذكاء الاصطناعي الرقمي والعمل البدني. مع طرح طراز X30 الرائد وحصول روبوت LYNX M20 على جائزة الابتكار في معرض الإلكترونيات الاستهلاكية 2026، فإن الصناعة لم […]
اختبار EMAT: فحص غير إتلافي عالي الدقة بلا فوضى

لعقود من الزمان، كان الاختبار بالموجات فوق الصوتية (UT) هو المعيار الذهبي للتحقق من سلامة الأصول، لكنه لا يزال يعاني من “احتكاك” تشغيلي. تتطلب المحولات الكهروإجهادية التقليدية وسيط اقتران سائل، مثل الماء أو الهلام، لنقل الموجات الصوتية إلى المادة. يتطلب هذا تحضيرًا مكثفًا للسطح، بما في ذلك إزالة الطلاءات والصدأ والأوساخ، يليه […]
فوليرو تي: إعادة تعريف عمليات فحص السلامة الإنشائية من خلال الفحص اللاإتلافي الجوي

لسنوات، تم الاحتفاء بالطائرات المسيرة الصناعية على أنها “عيون في السماء”، حيث توفر بيانات مرئية وحرارية لا تقدر بثمن من مسافة آمنة. ومع ذلك، بالنسبة لمديري سلامة الأصول، ظل هناك “ميل أخير” مهم: عدم القدرة على إجراء اختبارات مادية قائمة على اللمس دون الحاجة إلى سقالات باهظة الثمن، أو الوصول بالحبال المحفوف بالمخاطر، أو الآلات الثقيلة. أدخل فوليرو تي. هذا هو [...]
كيف يعيد جهاز FJD Trion V10i تعريف دقة السنتيمتر

في عام 2026، اختفت هوامش الخطأ في المسح الصناعي فعليًا. مع انتقالنا إلى عالم من الإدارة الذاتية للمواقع والتوائم الرقمية عالية الدقة، انتقل نطاق دقة 1-2 سم من كونه مطلبًا متخصصًا إلى المعيار الأساسي لكل مشروع. ومع ذلك، فإن تحقيق هذا المستوى من الدقة نادرًا ما يكون أمرًا “جاهزًا للتوصيل والتشغيل”. [...]
سلسلة FJD Trion: النظام البيئي GNSS لكل حدود التشغيل

في عام 2026، لم تعد دقة السنتيمترات ترفًا، بل هي شرط أساسي للموقع الصناعي الحديث. سواء كان ذلك أتمتة جرار لتحسين المحاصيل الصفية، أو توجيه حفارة في مشروع بناء معقد، أو نشر جزازات روبوتية مستقلة، فإن البيانات الجغرافية المكانية عالية الدقة تعمل كعمود فقري غير مرئي للكفاءة. ومع ذلك، فإن البيئة التشغيلية الحديثة متعددة الأوجه. [...]
FIFISH E-Master: ثورة في رسم خرائط قاع البحر
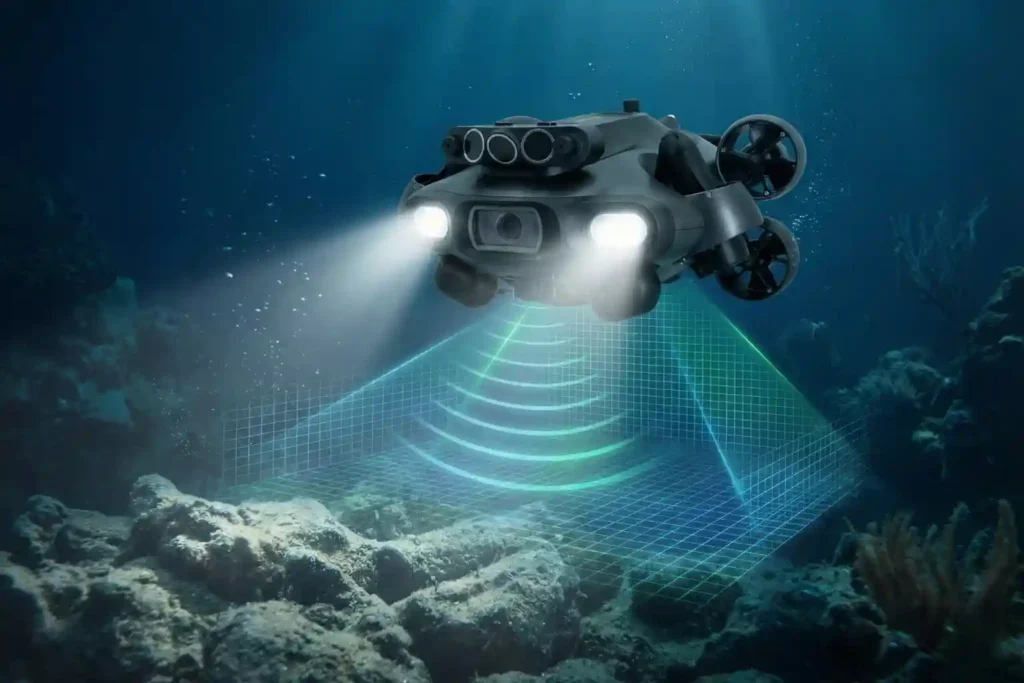
التنقل في الهاوية الصناعية تعقيد عام 2026: تطورت العمليات تحت الماء لتتجاوز الفحوصات البصرية البسيطة لتتطلب بيانات عالية الدقة، وتفاعلاً مادياً، وقدرة على التحمل في المياه العميقة. تحدي متعدد التخصصات: لا توجد أداة واحدة تناسب جميع المهام، تربية الأحياء المائية تتطلب الرشاقة، بينما تتطلب الطاقة البحرية حمولات ثقيلة وقياسات دقيقة. الحل: نقدم تشكيلة روبوتات QYSEA FIFISH تحت الماء، وهي [...]
ريو QYSEA: ذكاء لعصر ما تحت الماء
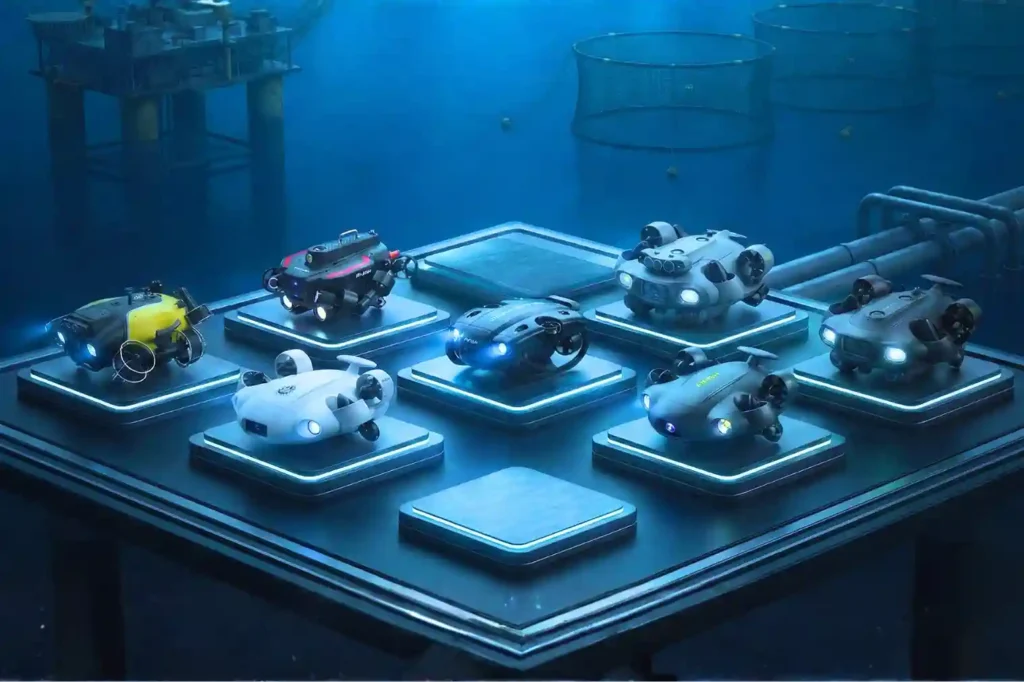
التنقل في الهاوية الصناعية تعقيد عام 2026: تطورت العمليات تحت الماء لتتجاوز الفحوصات البصرية البسيطة لتتطلب بيانات عالية الدقة، وتفاعلاً مادياً، وقدرة على التحمل في المياه العميقة. تحدي متعدد التخصصات: لا توجد أداة واحدة تناسب جميع المهام، تربية الأحياء المائية تتطلب الرشاقة، بينما تتطلب الطاقة البحرية حمولات ثقيلة وقياسات دقيقة. الحل: نقدم تشكيلة روبوتات QYSEA FIFISH تحت الماء، وهي [...]
