FIFISH E-Master: The Seafloor Mapping Revolution
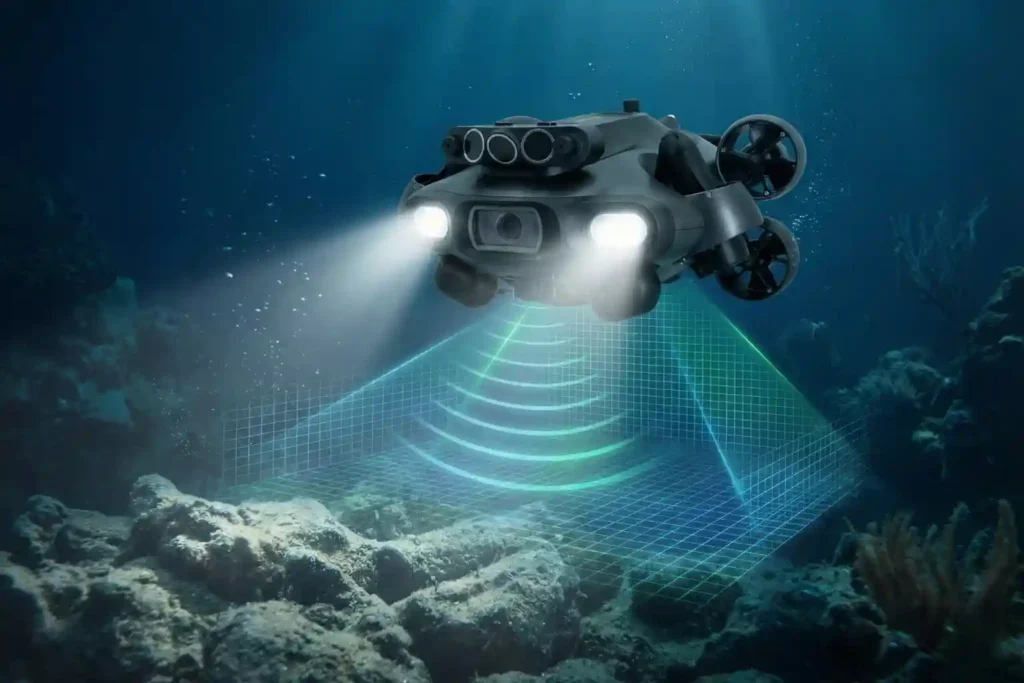
Navigating the Industrial Abyss The Complexity of 2026: Subsea operations have evolved beyond simple visual checks to requiring high-precision data, physical interaction, and deep-water endurance. The Multi-Disciplinary Challenge: No single tool fits all tasks, aquaculture requires agility, while offshore energy demands heavy-duty payloads and millimetric metrology. The Solution: Introducing the QYSEA FIFISH ROV Lineup, an AI-powered fleet designed to provide modular, scalable, and intelligent solutions for every underwater industrial sector. Specialized Tools for Specialized Missions The shift toward autonomous subsea auditing requires more than just a camera on a tether; it requires a specialized workforce of robotic agents. QYSEA’s lineup is engineered to bridge the gap between raw data collection and actionable engineering intelligence. 1. FIFISH V-EVO: The High-Frame-Rate Visual Metrology Standard The FIFISH V-EVO is the premier choice for visual-first inspections where motion clarity and environmental realism are critical. High-Speed Imaging Architecture: The V-EVO features a 4K UHD camera capable of 60 frames per second (fps). This higher frame rate is essential for capturing smooth footage of fast-moving turbine blades, propeller shafts, or moving biological stock in aquaculture, preventing the “motion blur” that plagues standard 30fps ROVs. Adaptive AI Plankton Filtering: One of the primary barriers to underwater clarity is “marine snow” suspended particles and plankton that reflect light and obscure details. The V-EVO utilizes an Adaptive AI filtering algorithm to digitally remove these visual obstructions in real-time, restoring clarity to images even in nutrient-rich or turbid coastal waters. Optics and Illumination: With a 166° ultra-wide field of view (FOV) and 5,000-lumen LED lights (5500K color temperature), the V-EVO maximizes situational awareness, allowing pilots to see structural contexts that narrower lenses miss. AI Vision Station Lock: Using machine vision, the V-EVO can lock onto a specific underwater subject, maintaining its relative position and focus with a single touch, which is critical for long-term observation of slow-growing corrosion or biological samples. 2. FIFISH E-GO: Biomimetic Agility for Industrial Productivity Designed with a “Hammerhead” shark-inspired form factor, the E-GO focuses on hydrodynamic efficiency and rapid operational switching. Ring-Wing Motor Propulsion: The E-GO utilizes a patented ring-wing motor system that provides a 30% power increase over traditional designs. This allows the drone to maintain speeds of 3+ knots even when fighting strong lateral currents common in open-water cage farming. The 9-Second Modular Ecosystem: To minimize site downtime, the E-GO features a quick-release accessory system allowing for tool installation in under 9 seconds. This enables a single ROV to transition from a net-repair mission to a water-quality sampling mission in seconds. Hot-Swappable Dual Power: The E-GO’s dual-battery architecture supports hot-swapping, meaning the ROV can stay powered on and connected to the station while batteries are replaced, enabling continuous “infinite” workflows without restarting missions. Macro Precision: A focused 10cm macro range allows the E-GO to perform extreme close-up inspections of welds, bolts, and delicate marine life that would be out of focus for standard industrial cameras. 3. FIFISH V6 PLUS: The Expert in Millimetric Structural Metrology The V6 PLUS is the enterprise benchmark for non-destructive testing (NDT) and precision measurements. Machine Vision AR Ruler: Moving beyond simple visual estimation, the V6 PLUS features a patented AR Ruler system. By combining machine vision with a laser scaler, it achieves a measurement precision of ±1cm, allowing engineers to accurately measure the length, width, and area of structural defects directly through the FIFISH App. Sonic Distance & Altitude Lock: Dual sonar sensors provide real-time distance and altitude tracking. The “Distance Lock” maintains a fixed stand-off distance from a hull or wall, while “Altitude Lock” maintains a fixed height above the seabed, ensuring the ROV does not drift during delicate NDT scans. Deep-Water Operational Envelope: Rated for 150 meters, the V6 PLUS is built for the deeper inspection requirements of hydropower dams, reservoir gates, and bridge pilings. 4. FIFISH V6 EXPERT: The Multi-Tool Platform for Complex Intervention The V6 EXPERT is the “Swiss Army Knife” of the lineup, designed to carry heavy payloads and diverse sensor arrays. Q-IF Interface Expansion: The V6 EXPERT features a heavy-duty Q-Interface that supports the simultaneous integration of up to 20+ professional tools. These include water samplers (100ml to 1500ml), pH/salinity/turbidity sensors, retrieval hooks, and underwater dozers. Onshore Power Supply System (OPSS): For missions requiring days of continuous monitoring, the V6 EXPERT can be tethered to an onshore power system, removing battery limitations and allowing the drone to stay submerged indefinitely for long-duration infrastructure audits. Enhanced 6000 Lumen Illumination: Dual 3000-lumen headlights provide the ultra-bright lighting necessary for the V6 EXPERT to perform manipulation tasks in the absolute darkness of deep-sea tunnels or silt-heavy environments. 5. FIFISH E-MASTER: The Vessel Hull and Bathymetric Specialist The E-MASTER is a revolutionary industrial AI ROV engineered for hull inspections and seabed mapping. Q-DVL Stabilized Hovering: The E-MASTER integrates both forward and downward Q-DVL (Doppler Velocity Log) modules. This allows for Station Lock Hovering against vertical hulls or moving currents, ensuring the drone remains perfectly steady while measuring biofouling or coating degradation. Integrated Bathymetric Mapping (QY-BT): By fusing data from the Q-DVL and echosounders, the E-MASTER can perform automated 2D and 3D seafloor mapping. Operators can generate topographic maps and calculate reservoir capacities with a single click. AI Measurement Accuracy: Using the QY-MT system, the E-MASTER can analyze underwater objects and fractures with a staggering 99.7% measurement accuracy, providing the high-fidelity data required for class-certified hull inspections. 6. FIFISH X1: The Heavy-Duty Offshore Intervention Powerhouse The X1 is a mission-class ROV designed to handle the most demanding conditions in the offshore energy sector. Heavy Payload and Propulsion: The X1 supports an massive 15kg payload capacity and is powered by the Q-Motor Pro system, which allows it to hold its position and operate in currents up to 4.0 knots. U-INS Plus Inertial Navigation: This system fuses data from the Q-DVL, accelerometers, gyroscopes, and magnetometers to enable precise 3D route planning. The X1 can autonomously navigate complex “jackets” and oil rig structures, following preset paths while the operator focuses on data collection. Tri-Directional Collision Avoidance: To protect the
The QYSEA ROV: Intelligence for the Subsea Era
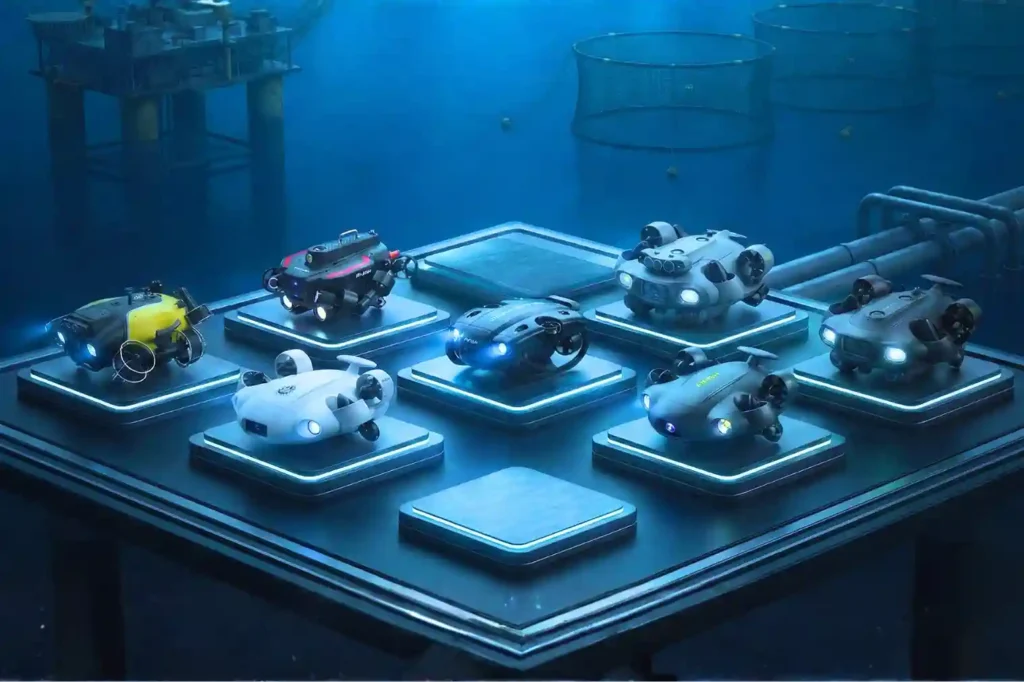
Navigating the Industrial Abyss The Complexity of 2026: Subsea operations have evolved beyond simple visual checks to requiring high-precision data, physical interaction, and deep-water endurance. The Multi-Disciplinary Challenge: No single tool fits all tasks, aquaculture requires agility, while offshore energy demands heavy-duty payloads and millimetric metrology. The Solution: Introducing the QYSEA FIFISH ROV Lineup, an AI-powered fleet designed to provide modular, scalable, and intelligent solutions for every underwater industrial sector. Specialized Tools for Specialized Missions The shift toward autonomous subsea auditing requires more than just a camera on a tether; it requires a specialized workforce of robotic agents. QYSEA’s lineup is engineered to bridge the gap between raw data collection and actionable engineering intelligence. 1. FIFISH V-EVO: The High-Frame-Rate Visual Metrology Standard The FIFISH V-EVO is the premier choice for visual-first inspections where motion clarity and environmental realism are critical. High-Speed Imaging Architecture: The V-EVO features a 4K UHD camera capable of 60 frames per second (fps). This higher frame rate is essential for capturing smooth footage of fast-moving turbine blades, propeller shafts, or moving biological stock in aquaculture, preventing the “motion blur” that plagues standard 30fps ROVs. Adaptive AI Plankton Filtering: One of the primary barriers to underwater clarity is “marine snow” suspended particles and plankton that reflect light and obscure details. The V-EVO utilizes an Adaptive AI filtering algorithm to digitally remove these visual obstructions in real-time, restoring clarity to images even in nutrient-rich or turbid coastal waters. Optics and Illumination: With a 166° ultra-wide field of view (FOV) and 5,000-lumen LED lights (5500K color temperature), the V-EVO maximizes situational awareness, allowing pilots to see structural contexts that narrower lenses miss. AI Vision Station Lock: Using machine vision, the V-EVO can lock onto a specific underwater subject, maintaining its relative position and focus with a single touch, which is critical for long-term observation of slow-growing corrosion or biological samples. 2. FIFISH E-GO: Biomimetic Agility for Industrial Productivity Designed with a “Hammerhead” shark-inspired form factor, the E-GO focuses on hydrodynamic efficiency and rapid operational switching. Ring-Wing Motor Propulsion: The E-GO utilizes a patented ring-wing motor system that provides a 30% power increase over traditional designs. This allows the drone to maintain speeds of 3+ knots even when fighting strong lateral currents common in open-water cage farming. The 9-Second Modular Ecosystem: To minimize site downtime, the E-GO features a quick-release accessory system allowing for tool installation in under 9 seconds. This enables a single ROV to transition from a net-repair mission to a water-quality sampling mission in seconds. Hot-Swappable Dual Power: The E-GO’s dual-battery architecture supports hot-swapping, meaning the ROV can stay powered on and connected to the station while batteries are replaced, enabling continuous “infinite” workflows without restarting missions. Macro Precision: A focused 10cm macro range allows the E-GO to perform extreme close-up inspections of welds, bolts, and delicate marine life that would be out of focus for standard industrial cameras. 3. FIFISH V6 PLUS: The Expert in Millimetric Structural Metrology The V6 PLUS is the enterprise benchmark for non-destructive testing (NDT) and precision measurements. Machine Vision AR Ruler: Moving beyond simple visual estimation, the V6 PLUS features a patented AR Ruler system. By combining machine vision with a laser scaler, it achieves a measurement precision of ±1cm, allowing engineers to accurately measure the length, width, and area of structural defects directly through the FIFISH App. Sonic Distance & Altitude Lock: Dual sonar sensors provide real-time distance and altitude tracking. The “Distance Lock” maintains a fixed stand-off distance from a hull or wall, while “Altitude Lock” maintains a fixed height above the seabed, ensuring the ROV does not drift during delicate NDT scans. Deep-Water Operational Envelope: Rated for 150 meters, the V6 PLUS is built for the deeper inspection requirements of hydropower dams, reservoir gates, and bridge pilings. 4. FIFISH V6 EXPERT: The Multi-Tool Platform for Complex Intervention The V6 EXPERT is the “Swiss Army Knife” of the lineup, designed to carry heavy payloads and diverse sensor arrays. Q-IF Interface Expansion: The V6 EXPERT features a heavy-duty Q-Interface that supports the simultaneous integration of up to 20+ professional tools. These include water samplers (100ml to 1500ml), pH/salinity/turbidity sensors, retrieval hooks, and underwater dozers. Onshore Power Supply System (OPSS): For missions requiring days of continuous monitoring, the V6 EXPERT can be tethered to an onshore power system, removing battery limitations and allowing the drone to stay submerged indefinitely for long-duration infrastructure audits. Enhanced 6000 Lumen Illumination: Dual 3000-lumen headlights provide the ultra-bright lighting necessary for the V6 EXPERT to perform manipulation tasks in the absolute darkness of deep-sea tunnels or silt-heavy environments. 5. FIFISH E-MASTER: The Vessel Hull and Bathymetric Specialist The E-MASTER is a revolutionary industrial AI ROV engineered for hull inspections and seabed mapping. Q-DVL Stabilized Hovering: The E-MASTER integrates both forward and downward Q-DVL (Doppler Velocity Log) modules. This allows for Station Lock Hovering against vertical hulls or moving currents, ensuring the drone remains perfectly steady while measuring biofouling or coating degradation. Integrated Bathymetric Mapping (QY-BT): By fusing data from the Q-DVL and echosounders, the E-MASTER can perform automated 2D and 3D seafloor mapping. Operators can generate topographic maps and calculate reservoir capacities with a single click. AI Measurement Accuracy: Using the QY-MT system, the E-MASTER can analyze underwater objects and fractures with a staggering 99.7% measurement accuracy, providing the high-fidelity data required for class-certified hull inspections. 6. FIFISH X1: The Heavy-Duty Offshore Intervention Powerhouse The X1 is a mission-class ROV designed to handle the most demanding conditions in the offshore energy sector. Heavy Payload and Propulsion: The X1 supports an massive 15kg payload capacity and is powered by the Q-Motor Pro system, which allows it to hold its position and operate in currents up to 4.0 knots. U-INS Plus Inertial Navigation: This system fuses data from the Q-DVL, accelerometers, gyroscopes, and magnetometers to enable precise 3D route planning. The X1 can autonomously navigate complex “jackets” and oil rig structures, following preset paths while the operator focuses on data collection. Tri-Directional Collision Avoidance: To protect the
Deepwater inspection: Identifying Early-Stage Damage in Offshore Assets with QYSEA

In the offshore energy sector, what you cannot see can cost you millions. Submerged infrastructure from oilfield wellheads to deep-sea port pilings exists in a state of constant chemical and structural attrition. Saltwater corrosion, biofouling, and extreme pressure work in tandem to create micro-cracks and material fatigue that are often invisible to the naked eye. When these early-stage defects are ignored, they inevitably evolve into catastrophic structural failures or environmental disasters. The industry is moving away from basic visual observation toward high-precision, data-driven monitoring. To achieve this, operators require an enterprise-grade platform capable of navigating extreme depths while providing the precision of a laboratory. The QYSEA FIFISH PRO W6 is that platform, an industrial-grade ROV designed to turn subsea data into actionable maintenance intelligence. Technical Superiority of the FIFISH PRO W6 The FIFISH PRO W6 is engineered specifically for harsh deepwater environments where standard ROVs falter. Its technical architecture is built to ensure that “hidden” damage is brought to light with uncompromising clarity. Deepwater Performance: Rated for a 350-meter dive depth, the W6 is a true industrial tool for deep-sea port and oilfield operations. Patented Propulsion: It features a unique 6 Q-motor system that provides stronger power and anti-current stability, ensuring the drone remains steady even in the unpredictable currents of the open ocean. Dual-Camera Visual Intelligence: The W6 utilizes an innovative Dual 4K Camera System. This setup coordinates operation monitoring with motion observation, providing a massive 166° horizontal field of view to ensure operators have a complete picture of the surrounding environment. Advanced Navigation and Stability: Station Lock: This algorithm locks the ROV’s position in place, preventing drift in complicated water environments to allow for exhaustive inspections of a single weld or joint. U-QPS Positioning: The Underwater Quick Positioning System provides real-time ROV location, 3D diving path recording, and point-of-interest (POI) marking, which is essential for mapping recurring corrosion patterns over time. Sonar Array: An optional sonar system enables Distance Lock, Altitude Lock, and Collision Avoidance, allowing the ROV to navigate safely near complex subsea structures in zero-visibility conditions. Precision Tools for Predictive Maintenance Identifying damage is only the first step; quantifying it is what enables predictive maintenance. The FIFISH PRO W6 is a modular “Swiss Army Knife” for non-destructive testing (NDT). Measuring the Invisible: The W6 is equipped with a high-precision ruler combination, including a standard Laser Ruler and an optional AR Ruler. These tools allow engineers to accurately measure the scale of cracks and hull damage to identify and prevent further structural degradation. Modular Versatility: With 5 Q-Interfaces for payload integration, the W6 can be customized with various industrial tools. It can simultaneously carry a robotic arm with a replaceable claw for sample collection and an imaging sonar for dark-water hull inspections. Operational Endurance: Removable Battery: The standard 388Wh battery can be swapped quickly on-site and supports a quick-charging mode that reaches 70% in just one hour. Onshore Power Supply: For missions requiring “unlimited endurance,” the W6 can be tethered to a miniaturized onshore power system, ensuring it can stay submerged as long as the task requires. Securing the Submerged Frontier The FIFISH PRO W6 transforms raw underwater footage into professional work reports. By integrating big data analysis and high-fidelity 3D mapping, it provides offshore managers with a clear roadmap for maintenance, significantly extending the lifecycle of critical assets. Implementing the W6 Workflow: Survey & Record: Use the U-QPS and Dual 4K cameras to create a 3D baseline of your asset. Measure & Analyze: Utilize the Laser/AR rulers to monitor the growth of known micro-cracks during recurring audits. Act & Maintain: Use the Robotic Arm for light maintenance or to clear biofouling for better visual access. Contact us and standardize your deepwater maintenance and turn your most critical offshore asset’s threats of the deep into manageable, actionable insights.
Major Update on GACA Regulation Part 107 Operation of UAS V5

The publication of GACAR Part 107 Version 5 represents a watershed moment for the Kingdom’s aviation sector. This update signifies a transition from a reactive, case-by-case regulatory model to a sophisticated, risk-based regulatory framework. By aligning Saudi Arabia’s General Authority of Civil Aviation (GACA) protocols with international best practices most notably the European Union Aviation Safety Agency (EASA) standards. V5 provides the legal certainty required for massive industrial investment. I. The Core Regulatory Architecture: Risk-Based Categorization The most fundamental change in GACA 107 V5 is the formalization of UAS operations into two primary categories based on the risk they pose to third parties on the ground and other aircraft in the sky: the open category and the specific category. The Open Category (Low Risk): This category is reserved for basic, low-risk operations. It does not require a prior “Operational Authorization” from GACA, provided the pilot adheres to strict standard operating limitations. Subcategory A1 (Fly Over People): Restricted to ultra-light drones typically < 250 g. Pilots must avoid flying over “assemblies of people”. Subcategory A2 (Fly Near People): For drones up to 2 kg or 4 kg (depending on class markings). Requires a high level of pilot competency and a safe distance of at least 30 meters from uninvolved persons. Subcategory A3 (Fly Far from People): For larger drones up to 25 kg. Operations must be conducted at least 150 meters away from residential, commercial, or industrial areas. The Specific Category (Moderate Risk): This is the domain of industrial and commercial drone services. Any operation that falls outside the Open Category, such as flying a 10 kg drone over a populated site or flying beyond visual line of sight (BVLOS) requires a formal Authorization. II. The Technical Mechanics of Standard Scenarios (STS) V5 introduces the GACA standard scenarios (STS), which serve as “pre-defined risk assessments.” Instead of an operator spending months conducting a SORA (Specific Operations Risk Assessment), they can now declare compliance with a specific STS template. GACA STS-V1 (VLOS Populated): This scenario allows for Visual Line of Sight (VLOS) operations at a maximum height of 120 meters (400 ft) over a controlled ground area in populated environments. Technical Drone Requirements: Drones must bear a specific class identification label (C5 or equivalent). This requires a Flight Termination System (FTS), a redundant kill-switch independent of the primary flight controller, and a low-speed mode to mitigate kinetic impact risk. GACA STS-B1 (BVLOS Sparsely Populated): This scenario enables Beyond Visual Line of Sight (BVLOS) operations, a game-changer for long-range asset monitoring. The drone can fly up to 1 km (or 2 km with visual observers) from the pilot. Technical Drone Requirements: Typically requires a C6 class drone. These aircraft must include Direct Remote Identification (Remote ID), which broadcasts the drone’s position, altitude, and serial number in real-time to law enforcement and airspace managers. III. Institutional Requirements: The Three Pillars of Compliance To operate legally under GACA 107 V5, a commercial entity must establish a triad of technical documentation and organizational controls. The Operations Manual (OM): This is the organization’s “geospatial bible.” It must detail the organizational structure, pilot training records, maintenance schedules, and technical specifications for every drone in the fleet. Safety Management System (SMS): GACA now requires a proactive approach to safety. Organizations must implement a system for identifying hazards, analyzing risks, and reporting “near-misses” or incidents back to the GACA UAS department within 72 hours. Emergency Response Plan (ERP): An ERP must be established and “drilled” regularly. It outlines the technical steps to be taken in the event of a link loss (C2 link failure), fly-away, or airspace incursion by a manned aircraft. IV. Remote Pilot Competency and Certification V5 elevates the status of the “Remote Pilot” to that of a certified aviation professional. The certification process is now modular: Fundamental Training: All commercial pilots must pass a GACA-approved theoretical exam covering airspace classification, aviation weather, and radio communication. STS-Specific Accreditation: For advanced missions, pilots must undergo Practical Skill Training and Assessment. This involves demonstrating proficiency in abnormal and emergency maneuvers, such as landing safely after a motor failure conducted by a GACA-recognized training entity. V. Fleet Readiness and Technical Sovereignty Finally, GACA 107 V5 mandates that every UAS used for commercial purposes in the Kingdom be registered and technologically compliant. Digital Registration: Each aircraft must be registered via the GACA portal, receiving a unique nationality and registration mark that must be physically displayed on the airframe. Remote ID Implementation: By the 2026 deadline, all drones operating in the Specific Category must be equipped with remote ID hardware. This creates a “digital license plate” for every drone, ensuring accountability and facilitating the future of a high-traffic low-altitude economy. The transition from Version 4 to GACAR Part 107 Version 5 introduces a structured methodology for operational authorization through Standard Scenarios (STS). These scenarios are technically defined “safety envelopes” that allow operators to bypass the complex Specific Operations Risk Assessment (SORA) process by adhering to a set of pre-verified technical and operational mitigations. For industrial players, this means the difference between a three-month approval cycle and a near-instantaneous operational declaration. Understanding the Standard Scenarios (STS) I. GACA STS-01: Precision VLOS in Populated Zones GACA STS-01 is the primary regulatory pathway for urban and high-density industrial work. It allows for operations within Visual Line of Sight (VLOS) at altitudes up to 120 meters (400 ft) over controlled ground areas. Technical Hardware Requirements (C5 Class Equivalence): To be compliant with STS-01, a UAS must meet rigorous hardware safety standards: Flight Termination System (FTS): The aircraft must be equipped with a redundant, independent “kill-switch.” This system must be capable of terminating flight either by cutting power to the motors or deploying a parachute even if the primary flight controller or C2 (Command and Control) link fails. Low-Speed Mode: When operating in proximity to people (within the controlled area), the drone must have a selectable low-speed mode that limits the maximum horizontal velocity (typically to 5 m/s) to minimize kinetic energy in the event of an
Cloud-First Mapping: Accelerating Construction Timelines with ArcGIS Online and ArcGIS Enterprise
Every drone mission, whether it is an inspection of a solar farm in NEOM or a volumetric survey in the Empty Quarter ends with a massive influx of data. Thousands of images, high-density point clouds, and thermal layers require a “home.” Without a robust platform to organize and visualize this information, your drone program is just a collection of hard drives. In the world of professional GIS, the choice of a home usually comes down to two paths: ArcGIS Online and ArcGIS Enterprise. Both platforms are industry-leading, but they offer fundamentally different approaches to how you manage, secure, and share your spatial intelligence. Choosing the wrong one can lead to operational bottlenecks or security risks. ArcGIS Online vs ArcGIS Enterprise Technically, both platforms allow you to create maps, analyze data, and share insights. However, the “where” and “how” differ significantly. ArcGIS Online: ArcGIS Online is a cloud-based Software-as-a-Service (SaaS) platform. Esri hosts the software, manages the updates, and handles the infrastructure. Zero Infrastructure: You don’t need servers or a specialized IT team to launch. You simply log in via a browser. Rapid Scalability: If you suddenly add 50 new field users, the cloud scales instantly to accommodate them. Mobile Synergy: It is perfectly optimized for field apps like ArcGIS Field Maps, allowing drone pilots to upload data directly to a shared cloud map. ArcGIS Enterprise: ArcGIS Enterprise is the full-featured GIS system designed to run on your infrastructure whether that is on-premises servers or your private cloud (like AWS or Azure). Total Data Sovereignty: You control exactly where your data sits. This is vital for industries with strict national security or privacy regulations. Advanced Analytics: Enterprise includes powerful components like the ArcGIS Image Server, which handles the massive raster processing required for large-scale drone orthomosaics. The Four Components: It consists of a Web Adaptor, a Portal, a Server, and a Data Store, giving your IT department granular control over every connection and permission. Choosing the Right Stack for Industrial Excellence The decision is rarely about which software is “better,” but rather which one fits your industry’s regulatory landscape. In Saudi Arabia, where giga-projects and the energy sector are governed by strict data residency laws, ArcGIS Enterprise is often the gold standard. It allows organizations to keep sensitive infrastructure data behind their own firewalls while still providing a collaborative “Portal” for engineers to access drone-captured Digital Twins. Conversely, for rapid urban development and environmental monitoring, ArcGIS Online offers a lower barrier to entry. It allows project managers to share interactive maps with stakeholders globally without the complexity of managing server hardware. Build Your Geospatial Future The future of industrial intelligence is not just about flying drones; it is about building the infrastructure that lives on the ground. Whether you need the agile, cloud-native power of ArcGIS Online or the secure, robust environment of ArcGIS Enterprise, the right architecture is essential for long-term success. As a strategic geospatial partner, we specialize in helping organizations choose and implement the right Esri stack. We bridge the gap between drone data acquisition and long-term GIS management. Let us help you architect a GIS solution that turns your drone data into a national asset.
Integrating Real-Time Data Acquisition and GIS Processing in Industrial Intelligence

In the traditional era of drone mapping, the capture of aerial imagery was only half the battle. For years, the bottleneck was the processing, loading thousands of high-resolution images onto local workstations that would churn for days to produce a single orthomosaic. This fragmented approach led to data silos, inconsistent results, and a lack of real-time collaboration. Today, we are witnessing a paradigm shift. Site Scan for ArcGIS, a cornerstone of the ArcGIS Reality suite, has transformed drone mapping into a seamless, end-to-end cloud-based workflow. By leveraging the unlimited scalability of the cloud, organizations can now handle massive datasets that were previously impossible to process locally. This is not just a change in software; it is an evolution of how we perceive and manage physical reality. From automated flight planning in the field to advanced AI analytics in the boardroom, the cloud is the engine driving the next generation of industrial intelligence. Autonomous Field Operations Technical excellence in drone mapping is not a product of chance; it is a meticulously engineered outcome that begins long before the drone ever leaves the ground. Within the site scan for ArcGIS cloud-based operations ecosystem, the ArcGIS Flight app serves as the sophisticated “tactical interface.” It shifts the paradigm from manual, pilot-dependent flight to a software-defined, repeatable mission architecture that ensures absolute data fidelity. I. Advanced 3D Mission Architectures and Photogrammetric Geometry Modern industrial assets, ranging from sprawling refinery complexes to complex bridge structures require more than a standard 2D “lawnmower” grid. To build a true Digital Twin, the system must capture the “verticality” and occlusion zones of an asset. Perimeter and Crosshatch Missions: For assets with significant vertical relief, such as telecommunications towers or high-rise construction sites, the system utilizes “Perimeter Scans.” The drone executes a series of concentric orbits at multiple altitudes, with the gimbal automatically adjusting its pitch to maintain a consistent angle toward the center. This ensures that every vertical face is captured with high overlap, typically maintained at 80% sidelap and 80% frontlap, providing the dense point cloud required for sharp, un-warped 3D meshes. Corridor Mapping and Vertical Inspection: For linear assets like pipelines or highways, the flight app utilizes corridor-specific algorithms that optimize the flight path to minimize battery consumption while maximizing coverage. In vertical inspection modes, the drone maintains a precise, fixed “stand-off” distance from a vertical face (like a dam wall or pylon), capturing high-resolution “flat” imagery that can be processed into specialized vertical orthomosaics. II. Intelligent Terrain Following and GSD Consistency One of the most critical variables in photogrammetry is the Ground Sample Distance (GSD), the physical distance on the ground represented by a single pixel. If a drone flies at a constant altitude above sea level while the terrain rises and falls, the GSD varies, leading to inconsistent resolution and measurement errors. Dynamic Altitude Adjustment via DEM Integration: ArcGIS Flight integrates high-resolution digital elevation models (DEMs). The drone dynamically adjusts its altitude in real-time to maintain a constant height above the ground surface. This results in a uniform GSD across the entire dataset, ensuring that a measurement taken on a mountain peak is as accurate as one taken in a valley. Automatic Overlap Recalculation: The software monitors ground speed and wind resistance in real-time. If the drone encounters a strong headwind, the system recalibrates the shutter trigger intervals. This ensures the required overlap is maintained perfectly, preventing “gaps” in the data that could lead to failures during the cloud-processing phase. III. Sensor Integration and Field-Level Georeferencing The accuracy of the final map is only as good as the metadata attached to each image. Site Scan supports advanced hardware integration to eliminate the need for traditional, time-consuming ground surveys. RTK and PPK Workflows: The flight app natively communicates with Real-Time Kinematic (RTK) and Post-Processed Kinematic (PPK) enabled drones. By receiving corrections from a base station or NTRIP network, the drone geotags each image with centimeter-level accuracy at the moment of capture. This minimizes, and often eliminates, the need for laying manual Ground Control Points (GCPs), saving hours of field labor. Multi-Sensor Support: Beyond standard visual (RGB) sensors, the framework supports multispectral and thermal payloads. This allows for the capture of specialized data layers. such as vegetation health indexes or thermal signatures for solar farm inspections. All managed within the same autonomous flight interface. IV. Pre-Flight Rigor and Field-to-Cloud Synchronization Custom Safety Checklists: To ensure enterprise-wide compliance, administrators can push mandatory pre-flight checklists to the field app. Pilots must verify everything from airspace authorization (LAANC) to battery voltage and signal strength before the “Take Off” button is enabled. Quick Tiling for Field Verification: One of the most powerful features of the cloud-based operation is Quick Tiling. Immediately after landing, the pilot can generate a low-resolution orthomosaic preview in the cloud while still on-site. This allows for instant verification: Did we cover the entire site? Are there any blurry images due to low light? If a gap is detected, the pilot can re-fly the specific segment immediately, preventing a costly return trip to a remote site. Transforming Pixels into Insight The true technical “engine” of site scan for ArcGIS cloud-based operations lies in its processing architecture. By decoupling data computation from physical hardware, Site Scan leverages the elastic power of the cloud to perform complex photogrammetric reconstructions that would overwhelm even the most advanced local workstations. This section explores the mechanics of how raw aerial imagery is transformed into a high-fidelity geospatial intelligence product. I. Elastic Computing and Massive Parallelization Traditional photogrammetry is a computationally “heavy” task that requires intense CPU and GPU resources. In a local environment, this creates a linear bottleneck: the more images you have, the longer you wait. Site Scan solves this through massive parallelization. Distributed Task Processing: When a dataset is uploaded to the Site Scan Manager, the cloud architecture breaks the project into thousands of discrete tasks. These tasks are distributed across an elastic cluster of server nodes. For instance, while one node calculates the internal orientation of a camera,
Engineering the “Eyes” of Autonomous Flight with Digital Twin & Synthetic Vision

The Pilotless Revolution The future of urban transportation is not just in the air; it is autonomous. To realize the full potential of Advanced Air Mobility (AAM), air taxis must transition from human-piloted craft to fully autonomous systems capable of scaling across busy metropolitan centers. However, this transition faces a massive technical hurdle: the “urban canyon” effect. In dense cities like Riyadh or Dubai, traditional GPS-based navigation systems often fail because tall buildings block or reflect signals, leading to high positioning uncertainty. For a pilotless air taxi, a loss of GPS signal is more than an inconvenience. It is a critical safety risk. To solve this, the industry is engineering a hybrid intelligence layer that combines high-resolution digital twins with synthetic vision. These technologies act as the essential “eyes” of autonomous air taxi navigation, allowing vehicles to move with millimeter precision regardless of satellite availability or visibility conditions. How Autonomous Systems “See” Pilotless flight requires two distinct types of “vision”: a pre-loaded knowledge of the world (the map) and a real-time ability to navigate within it (the sensor). I. High-Resolution Photogrammetry: The “Reference Map” Before an air taxi even takes off, it needs a perfect 3D digital replica of its environment, a digital twin. Data Capture: Using specialized mapping drones, we capture thousands of overlapping high-resolution images of the urban landscape. 3D Reconstruction: Through photogrammetry, these 2D images are processed offline into highly accurate 3D textured mesh models. The Result: This provides the air taxi with a “geometric anchor,” a static world model that includes every building edge, helipad, and power line with centimeter-level accuracy. II. Visual SLAM: The “Real-Time Eye” While photogrammetry provides the map, Visual Simultaneous Localization and Mapping (Visual SLAM) provides the movement. GPS-Denied Precision: Onboard cameras extract distinctive “visual words” or features from the surrounding environment in real-time. Dynamic Mapping: As the taxi flies, it iteratively builds a sparse 3D point cloud of its path, comparing it instantly to its pre-loaded Digital Twin to correct for trajectory drift. Continuous Tracking: This allows the vehicle to determine its position and attitude (orientation) at the speed of acquisition, ensuring it stays on its designated path even without GPS. III. Synthetic vision Systems (SVS): The Virtual Cockpit synthetic vision is the technology that fuses the map and the sensor data into a 3D virtual representation of the external world. Intuitive Navigation: SVS takes terrain, obstacle, and traffic data and renders it as computer-generated imagery. Weather Independence: Because SVS relies on on-board databases and real-time sensor fusion rather than human eyesight, it remains fully functional in zero-visibility conditions like heavy fog, smoke, or total darkness. Building Trust in Autonomy For autonomous air taxi navigation to become the norm, it must prove it is safer than a human pilot. Trust is built through three layers of digital protection: Predictive Safety via digital twins: Operational digital twins (ODTs) allow for synthetic testing of unmanned traffic management. The system can simulate thousands of emergency scenarios like sudden engine failure or unexpected obstacles to refine how the autonomous autopilot will respond in the real world. 360-Degree Situational Awareness: While a human pilot has limited forward visibility, a synthetic vision system processes 360-degree data from visual, thermal, and LiDAR sensors simultaneously. This ensures the aircraft can detect and avoid other drones or birds long before they enter its immediate flight path. Reliability Through Sensor Fusion: The aircraft does not rely on a single data source. It tightly integrates Inertial Measurement Units (IMU), Visual SLAM, and healthy GPS signals (when available) to maintain stable flight even during extreme wind or equipment malfunctions. Operationalizing the Sky The pilotless revolution is no longer a distant dream, it is an engineering reality. The combination of photogrammetry-based digital twins and visual SLAM navigation is the cornerstone of safe, scalable autonomous air taxi navigation. The time to digitize is now, the sky-highways of 2030 are being mapped today. Without high-resolution digital infrastructure, the “eyes” of tomorrow’s air taxis will have nothing to see. Create the high-resolution digital twins required for autonomous navigation, ensuring your urban assets are ready for the first wave of commercial eVTOL flights.
Navigating the Future Air Transportation with Aerial Corridor Mapping

For decades, we have looked at the sky above our cities as an open, unstructured void. While our roads became congested and our ground-level infrastructure reached its physical limits, the airspace remained the “final frontier” for urban transport. However, as we move through 2026, that void is being filled. A quiet revolution is occurring just a few hundred feet above the pavement. The sky is being transformed into a structured, regulated, and highly efficient network of digital highways. In early 2025, the United Arab Emirates officially launched a groundbreaking national project to map aerial corridors specifically for air taxis and cargo drones. This initiative is not merely a pilot program; it is the fundamental construction of the infrastructure required for Advanced Air Mobility (AAM). By digitizing the airspace, the UAE is ensuring that the transition to electric vertical take-off and landing (eVTOL) aircraft is not only possible but inherently safe. The era of “free flight” is ending, and the era of aerial corridor mapping has begun. Just as the 20th century was defined by the expansion of the interstate highway system, the 21st century will be defined by our ability to map and manage the low-altitude corridors of the sky. Engineering the Vertical Highway Building a highway in the sky is significantly more complex than traditional road construction. You cannot simply paint lanes in the air; instead, you must engineer a high-resolution, three-dimensional digital framework that accounts for every physical and atmospheric variable. The ongoing aerial corridor mapping project led by the UAE’s General Civil Aviation Authority (GCAA) and the Technology Innovation Institute (TII) utilizes a sophisticated “technology stack” to create these invisible lanes. I. The High-Precision Technology Stack The engineering of these corridors relies on a multi-sensor approach to achieve sub-one-meter precision: LiDAR SLAM and Dense Point Clouds: Drones equipped with Light Detection and Ranging (LiDAR) and Simultaneous Localization and Mapping (SLAM) sensors generate 3D “point clouds,” millions of laser-measured coordinates that recreate the city’s geometry. Modern frameworks like FAST-LIO2 tightly integrate Inertial Measurement Unit (IMU) data to ensure accuracy even during rapid maneuvers. Visual SLAM and Photogrammetry: While LiDAR captures geometry, visual SLAM uses camera keyframes and feature detection to visually reconstruct the environment. Integrating these datasets produces photo-realistic digital twins that aid in “synthetic vision,” allowing autonomous air taxis to “see” and navigate accurately in poor visibility. Atmospheric Modeling: Unlike ground roads, air corridors are dynamic. TII uses advanced simulations to analyze 3D wind flow around skyscrapers and urban terrain. This is critical for defining flight safety boundaries and predicting how micro-currents might affect eVTOL stability. II. Defining Airspace Volumes and Safeguards The digital mapping process enables a rigorous vertical layering of the airspace to prevent congestion and accidents: Vertical Layering: Current trials are testing specific altitude tiers: 500–1,000 feet: A dedicated Safety Buffer Zone kept clear for emergency rerouting or response. 1,000–3,000 feet: The Air Taxi Cruise Zone, reserved for high-speed transit of passenger eVTOLs on fixed urban routes. Obstacle Evaluation Surfaces (OES): Leveraging GIS capabilities like ArcGIS Aviation, authorities can model Obstacle Limitation Surfaces (OLS). These are 3D volumes that must remain free of intruding objects like cranes or telecom towers. If a structure penetrates these digital boundaries, the system automatically triggers an aeronautical study to adjust the corridor. III. Real-Time Autonomous Intelligence The ultimate goal of aerial corridor mapping is to feed data into AI-powered control and communication algorithms. These systems enable real-time decision-making for autonomous aircraft, ensuring they can optimize routes and avoid collisions with other unmanned traffic systems (UTM). This creates a seamless, connected multimodal network that integrates ground, waterways, and skies into a single transportation ecosystem. Transforming Urban Living and Economics The drive for aerial corridor mapping is fueled by a desire to fundamentally transform the economic and social fabric of urban environments. As we enter 2026, Advanced Air Mobility (AAM) has transitioned from a demonstrative concept into a “commercially bankable” aviation sub-sector. By establishing these sky-highways, the Middle East and specifically the UAE is positioning itself as the undisputed global reference case for the trillion-dollar low-altitude economy. I. Unlocking The $87B Logistics Market The economic potential of a mapped airspace is staggering, with the global AAM market projected to grow from $11.4 billion in 2024 to over $87 billion by 2034. Heavy-Lift Cargo Dominance: Cargo drones represent the earliest and most dominant segment of this growth, valued at approximately $1.2 billion in 2024 and expected to reach $6.3 billion by 2034. These systems enable rapid, eco-friendly logistics for high-value, time-sensitive goods, such as medical supplies and perishables across infrastructure-challenged regions. Operational Efficiency: By bypassing traditional ground traffic, which cost major urban centers like New York nearly $74 billion in lost productivity annually, AAM offers a scalable solution to congestion. II. The Premium Mobility Economy In March 2026, Dubai is set to launch its first operational vertiport, initiating a rapid transit network for air taxis. This “verticalization” of the airspace allows for unprecedented travel speed: Time Recovery: eVTOL aircraft, such as the Archer Midnight or Joby models, can condense a 60–90 minute ground commute into a 10–15 minute aerial transit. Multimodal Integration: Modern vertiports are designed to integrate seamlessly into the urban landscape, utilizing rooftops, parking structures, and water facilities to connect with existing rail, car, and airport hubs. This multimodal connectivity ensures AAM complements rather than replaces existing infrastructure, facilitating both urban and rural economic growth. III. Infrastructure Precedent and Asset Value For developers and giga-project stakeholders, the mapping of aerial corridors creates a new “premium mobility” tier in real estate: Digital Infrastructure Investment: By formalizing standards ahead of other global jurisdictions, the UAE reduces uncertainty for manufacturers, insurers, and infrastructure investors. Licensing and Employment: The expansion of these networks is expected to result in tens of thousands of new jobs in manufacturing, maintenance, and autonomous operations, stimulating long-term capital formation. Safety and public acceptance remain the primary catalysts for this desire. The public will only embrace AAM if it feels as safe as traditional transport. High-fidelity data from
Securing Marine Assets with ROV Inspection and Subsea NDT.

While the world marvels at the soaring skyscrapers of Riyadh and the mirrored walls of NEOM, a second, equally ambitious infrastructure revolution is taking place beneath the waves. Saudi Arabia’s maritime infrastructure, spanning the Red Sea and the Arabian Gulf is home to a vast, invisible network of subsea lifelines, including oil and gas pipelines, high-voltage power cables, and critical communication links. However, this underwater world is a hostile environment. In these harsh maritime zones, infrastructure faces constant threats from aggressive saltwater corrosion, intense pressure, and biofouling. Traditional manual diving, while historically necessary, cannot keep pace with the scale of Vision 2030’s coastal giga-projects. It is slow, limited by depth, and carries high physical risk to personnel. The high cost of failure in these zones, ranging from environmental disasters to billion-dollar energy shutdowns demands a technological shift. The transition from human-led diving to subsea robotics in Saudi Arabia is no longer just an upgrade; it is an essential requirement for the long-term integrity of the Kingdom’s offshore and coastal assets. The Technology of the Deep The core of this revolution is the Remotely Operated Vehicle (ROV). These inspection-class robots act as the eyes and hands of engineers in environments where humans simply should not go. From Divers to ROVs: Unlike human divers, ROVs can operate 24/7 at depths exceeding hundreds of meters, unaffected by the physiological limits of pressure or oxygen. Advanced Sensing and Vision: Modern ROVs utilize high-definition visual imaging and multibeam sonar to navigate and “see” even in the silty, low-visibility conditions of the seabed. Quantitative Corrosion Mapping: Specialized ROVs are equipped with Ultrasonic Thickness (UT) gauges and cathodic protection (CP) probes. These tools allow for precise, contact-based measurements of metal thickness and electrical potential, identifying thinning pipe walls long before a leak occurs. Integrated Frameworks: Terra Drone Arabia (TDSA) has pioneered a unified framework that merges subsea ROV data with aerial UAV and terrestrial scans. This provides asset owners with a single, holistic view of their infrastructure from the seabed to the sky. Securing Coastal and Offshore Assets The deployment of subsea robotics in Saudi Arabia serves as the primary defense for the Kingdom’s most valuable maritime investments. Offshore Oil & Gas Integrity: Routine monitoring of platform jackets, risers, and subsea production systems is vital. ROVs detect structural fatigue and weld defects early, ensuring compliance with global safety standards and preventing catastrophic failures in the Arabian Gulf. Coastal Giga-Projects (NEOM & The Red Sea): As the Red Sea project and NEOM expand, maintaining the integrity of underwater jetties, desalination intakes, and luxury coastal structures is paramount. ROVs monitor these assets while simultaneously conducting environmental surveys to protect the Kingdom’s precious coral reefs. Data-Driven Longevity: Every dive generates a digital trail. By building Digital Twins from ROV data, engineers can perform predictive maintenance. This allows operators to simulate structural degradation and extend the lifespan of multi-billion dollar assets through precisely timed interventions. Diving into the Digital Future The future of marine asset management in the Kingdom is undeniably robotic. The precision, safety, and scalability offered by subsea robotics in Saudi Arabia provide the foundation for the next decade of maritime development. Terra Drone Arabia is leading this transition, bringing global robotic expertise to the Kingdom’s local shores. We integrate cutting-edge ROV technology with advanced data analytics to ensure your subsea assets remain secure and compliant. Don’t complex your underwater inspection. Contact us for your marine infrastructure and experience the certainty of digital subsea integrity.
The 2025 Recap from Terra Drone Arabia

As the curtain falls on 2025, the industrial landscape of Saudi Arabia stands fundamentally altered. What was once a horizon dominated by traditional manual labor and terrestrial surveying has transitioned into a high-velocity, data-driven domain known as the Low Altitude Economy (LAE). At the heart of this revolution is Terra Drone Arabia (TDSA). This Terra Drone Arabia 2025 recap serves not just as a history of the past twelve months, but as a roadmap for how unmanned aerial systems (UAS) have become the bedrock of the Kingdom’s industrial. Throughout 2025, TDSA moved beyond the role of a simple service provider to become a strategic architect of the Saudi digital ecosystem. From the deep shafts of mineral exploration in the Hijaz mountains to the complex flare stacks of Eastern Province refineries, Terra Drone’s influence was ubiquitous. It was a year defined by three core pillars: localization, technical integration, and a relentless commitment to the goals of Saudi Vision. Q1: Localization and Standardization The year began with an aggressive focus on two sectors critical to the Kingdom’s diversification: energy and mining. In January, TDSA demonstrated its deep-rooted commitment to the Saudi workforce and supply chain at the 10th iktva Forum & Exhibition 2025. This event served as a public declaration that TDSA is not just operating in Saudi Arabia; it is of Saudi Arabia, focusing on local talent development and technological sovereignty. Simultaneously, the Future Minerals Forum 2025 showcased how drone solutions are no longer “optional extras” but are now the new industry standard in mining. By integrating satellite imagery with modern mining workflows, TDSA enabled explorations to move at a pace previously thought impossible, achieving results up to eight times faster than conventional. February shifted the focus toward the “City of the Future.” At the Al Ahsa Forum, TDSA unveiled how smart city drones are essential for the urban development of the East. The narrative of February was one of “Smart Urbanism,” where UAVs are used not just for mapping, but as the sensory nervous system of emerging smart. Q2: Strategic MoUs and Educational Initiatives If Q1 was about showcasing technology, Q2 was about institutionalizing it. March and April were dominated by a historic milestone: Terra Drone signing a Memorandum of Understanding (MoU) with Saudi Arabia. This agreement was a seismic shift in the regional tech landscape, designed to drive innovation and localization in drone technology specifically for the global energy. However, innovation is useless without a skilled workforce to operate it. In May, TDSA and the ITQAN Institute signed an MoU to launch specialized drone inspection training. This initiative ensured that the next generation of Saudi engineers is equipped to handle advanced assets like the Voliro T, a drone capable of performing Non-Destructive Testing (NDT) at heights, potentially saving operators millions in. By the end of the quarter, the conversation moved toward ESG (Environmental, Social, and Governance) excellence. TDSA began advocating for drone monitoring as the “fast-track” to achieving safety and environmental goals, emphasizing that a digitized asset is a safer and more sustainable. Q3: Scaling Infrastructure and Global Distribution As the summer months arrived, the scale of operations reached new heights. June and July saw TDSA positioning drones as a core pillar of Vision 2030’s infrastructure. The company proved that aerial surveillance could save up to 95% of traditional costs in large-scale monitoring. A major highlight of this period was the global rollout of the Terra Xross 1, a Japan-made indoor inspection. Through distribution agreements with partners in Taiwan, Chile, and beyond, TDSA’s influence as a global hub for indoor inspection technology was. This was not merely about international sales; it was about proving that technology vetted in the harsh industrial environments of Saudi Arabia is world-class. In August, TDSA tackled the challenge of renewable energy. By utilizing drone topographic surveys, the company demonstrated a reduction in renewable energy site preparation time by up to 90%. This speed is essential for the Kingdom as it races toward its ambitious green energy targets. Furthermore, the introduction of the DJI Dock solution showed city planners how to save 30% of surveillance budgets through automation and persistent aerial presence18. Q4: The Rise of Integrated Inspection Frameworks The final months of 2025 witnessed a shift from individual drone flights to holistic asset management. In October and November, TDSA moved the goalposts by introducing an integrated aerial, terrestrial, and marine inspection. This approach acknowledges that industrial asset integrity does not end at the waterline or the ground level; it requires a unified view of the entire. One of the most technically impressive feats discussed in November was the rise of ROV-based monitoring for marine. By combining subsea ROV data with aerial UAV data, TDSA created the ultimate “Digital Twin,” a 3D roadmap for highway construction, mining, and offshore energy that allows for near-real-time decision. The year concluded with a focus on safety and compliance. TDSA’s global group company, Unifly, completed trials on collision avoidance and safe flight separation, ensuring that as the skies of Saudi Arabia become more crowded with drones, they remain. This technical groundwork is what allows for the rise of the economy under 1,000 feet, turning the sky into a productive industrial. Technical Deep Dive: The Evolution of Autonomous Systems To understand why 2025 was so successful, one must look at the specific technologies that matured during this period. UTM (Unmanned Traffic Management): TDSA emphasized that UTM systems are the primary driver of flight safety and compliance, paving the way for scalable drone operations across the Middle. BVLOS (Beyond Visual Line of Sight): The ability to fly long-distance corridors for power transmission and pipelines became a reality, improving project timelines. LiDAR and Photogrammetry Integration: By revolutionizing land surveying with integrated LiDAR, TDSA enabled topographic mapping of 124 km² in just one month, a feat that would take traditional teams years to. NDT (Non-Destructive Testing): The shift to drone-based visual and ultrasonic thickness (UT) systems revolutionized corrosion inspection, allowing for inspections of live flare stacks and storage tanks without cost. The