Habitat Mapping for Bird Migration: Protecting Safe Stops

Every year, millions of birds cross continents to find better weather and food. As of May 2026, Saudi Arabia remains a vital safe haven on the African-Eurasian flyway, serving as a rest stop for these travelers. The Kingdom is home to over 500 bird species and hosts 14 out of the 15 species that are […]
GACA Drone Regulations: The 2026 Permit Guide

In 2026, Saudi Arabia’s drone industry is a core part of the Kingdom’s digital transformation and Vision 2030 goals. Operating a drone professionally requires more than just a controller; it requires a multi-step legal framework. Following GACA regulations ensures that your business objectives are recognized as part of a safe and integrated airspace. This guide […]
Shahed-136: Affordable Protection for Strategic Sites

The modern battlefield is undergoing a rapid and permanent transformation. The Shahed-136 has transitioned from a niche experimental tool into what experts call a “single reliable weapon” for asymmetric warfare. These slow-moving loitering munitions are designed for one purpose: to strike deep into enemy territory with high precision. They have moved the front lines away […]
Why Drones Are Faster Than Traditional Mapping for Large Sites
Mapping large, rugged areas of land like those in Makkah has traditionally been a slow and labor-intensive process. When dealing with several square kilometers of uneven terrain, manual ground teams often spend weeks or even months walking the site to collect enough data points. In the recent project taking place in Makkah, the goal was […]
Owning A Drone vs Hiring a Vendor: Which One Do You Actually Need?

Many business owners see the price tag of a high-end drone and think that is the only cost they need to worry about. But buying a professional drone is like looking at an iceberg. The purchase price is just the small part you see above the water. Beneath the surface is a massive collection of […]
Drone Defense Overview: Exploring the Drone Detection Solution

The sky is becoming a busy place as commercial drones are now used for everything from delivery to photography. While most are harmless, the proliferation of these machines creates new risks for critical infrastructure like power plants and large public events. Traditional security cannot stop a threat that comes from above. This is why modern […]
How Virtual Models Prevent Costly Building Mistakes Before It’s Built
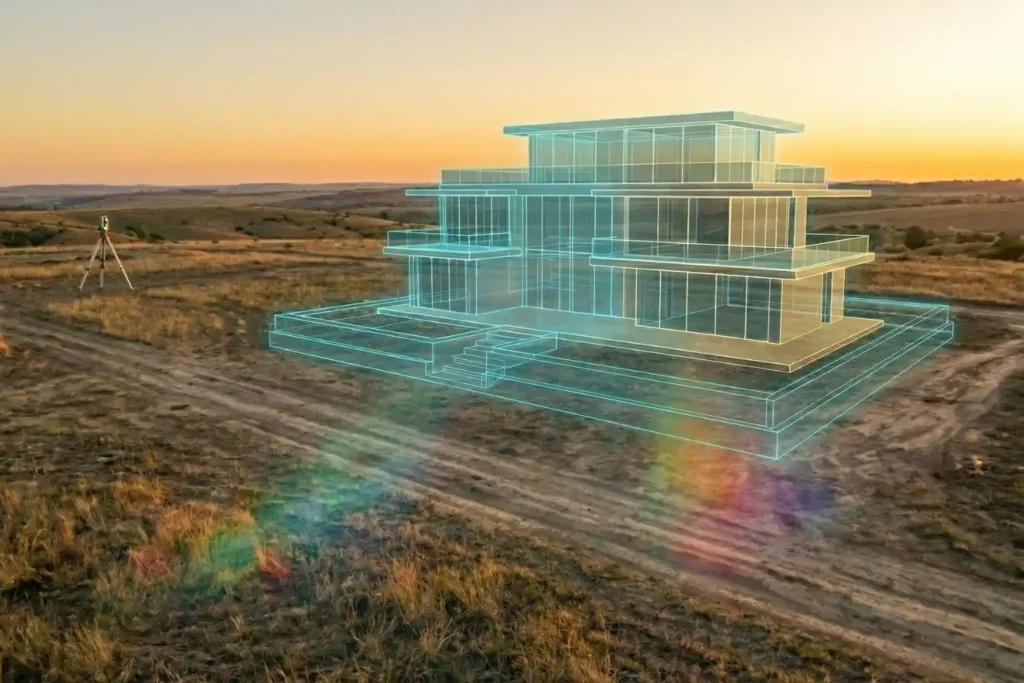
Urban planning is, without a doubt, a beautiful prospect. There is a certain magic in envisioning a skyline defined by luxurious, modern architecture and vibrant communal spaces. But as any developer knows, bringing those sleek glass-and-steel visions to life is where the true challenge begins. Planning a development isn’t as simple as placing pawns on […]
Safe Site Measurement: Visual RTK GNSS Measurement for Elevation Models and Surface Mapping

In the high-stakes environments of 2026, topographic surveying has evolved. We have moved past simple coordinates and into the realm of complex Digital Elevation Models (DEM) and Digital Surface Models (DSM). However, a persistent challenge remains: the vertical barrier. Whether it is an unstable pit wall in a quarry or a jagged stockpile in a […]
DJI Mavic 3: The Portable Work Drone

For years, professional drone operations were synonymous with large vans, heavy equipment cases, and multi-person crews. However, as we move through 2026, the industry has realized a vital truth: drones alone are no longer enough for operational purposes. While the aircraft gets you into the sky, reliable software is needed to process the large amounts […]
The Complete DJI Enterprise Software Guide: From Data to Intel

Drones alone are no longer enough for operational purposes. While a high-performance aircraft is the “muscle” of the operation, it is merely a vehicle for sensors. To truly unlock value, reliable software is needed to process large amounts of data acquired during field missions. The complexity of modern infrastructure means that “one size fits all” […]